2.1 3D homogeneous transforms
In this section, functions dealing with 4 × 4 homogeneous transform matrices are
described.
eulzxz
Syntax
ReturnMatrix eulzxz(const ColumnVector & a);
Description
Given a column vector a
this function returns the homogeneous transform matrix given by
Note: the column vector a must have a length of at least 3. Only the first 3
elements are used.
Return Value
Matrix
ieulzxz
Syntax
ReturnMatrix ieulzxz(const Matrix & R);
Description
Given a homogeneous transform matrix R, this function returns a column vector
such that the 3 × 3 rotation bloc of the matrix is equal to the 3 × 3 rotation bloc of the matrix R.
Return Value
ColumnVector.
irotk
Syntax
ReturnMatrix irotk(const Matrix & R);
Description
Given a homogeneous transform matrix R, this function returns a column vector
with k a unit vector such that the 3 × 3 rotation bloc of the matrix is equal to the 3 × 3 rotation bloc of the matrix R.
Return Value
ColumnVector.
irpy
Syntax
ReturnMatrix irpy(const Matrix & R);
Description
Given a homogeneous transform matrix R, this function returns a column vector
such that the 3 × 3 rotation bloc of the matrix is equal to the 3 × 3 rotation bloc of the matrix R.
Return Value
ColumnVector.
rotd
Syntax
ReturnMatrix rotd(const Real theta,
const ColumnVector & k1,
const ColumnVector & k2);
Description
This function returns the matrix of a rotation of an angle theta around the
oriented line segment defined by the points k1 and k2.
Note: the column vectors k1 and k2 must have a length of at least 3. Only the
first 3 elements are used.
Return Value
Matrix
rotk
Syntax
ReturnMatrix rotk(const Real theta,
const ColumnVector & k);
Description
This function returns the matrix of a rotation of an angle theta around the
vector k.
Note: the column vector k must have a length of at least 3. Only the first 3
elements are used.
Return Value
Matrix
rpy
Syntax
ReturnMatrix rpy(const ColumnVector & a);
Description
Given a column vector a
this function returns the homogeneous transform matrix given by
Note: the column vector a must have a length of at least 3. Only the first 3
elements are used.
Return Value
Matrix
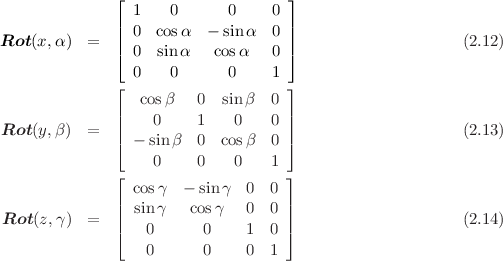
rotx, roty, rotz
Syntax
ReturnMatrix rotx(const Real alpha);
ReturnMatrix roty(const Real beta);
ReturnMatrix rotz(const Real gamma);
Description
These functions return the elementary rotation matrices:
Return Value
Matrix
trans
Syntax
ReturnMatrix trans(const ColumnVector & a);
Description
Given a column vector a, this function returns the following matrix:
Note: the column vector a must have a length of at least 3. Only the first 3
elements are used.
Return Value
Matrix




![[ ]
k (2.5)
θ](robot4x.png)